다양한 물체를 파지하고 조작하기 위해 물체 인식과 영상기반 로봇제어 기술을 개발한다.
RGB-D 카메라 데이터를 기반으로 영상처리, 3D Point Cloud Registration,
딥러닝 네트웍을 이용하여 인식하고 자세를 추정 한다.
Camera/Robot Calibration, Visual Servoing, Path Planning을 이용하여 물체를 조작 한다.
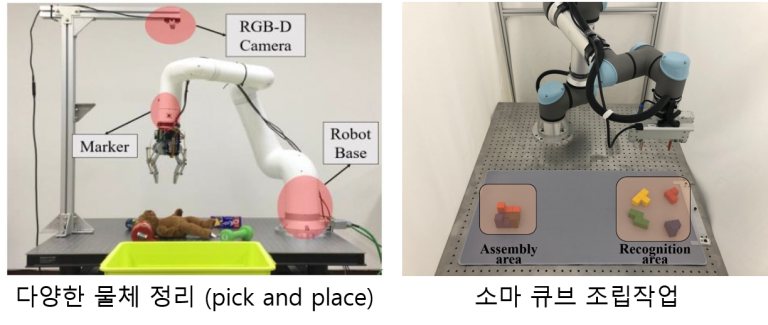
이러한 기술을 이용하여 물체를 정리하거나 소마 큐브를 조립하는 작업을 구현하였다