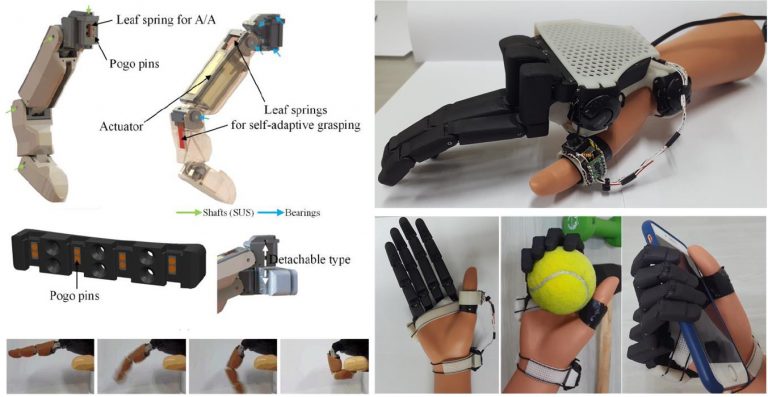
손가락 절단 환자를 위해서는 가볍고 견고한 인공 의수가 필요하다.
본 프로젝트는 컴팩트한 손가락 모듈 및 핸드 메커니즘 개발을 위해 다양한 형태의
인공 의수 개발을 진행해 왔다.
개발된 의수는 Tendon 및 Actuator를 사용하여, Adduction/Abduction/물체 적응형 파지 동작 등이 가능하도록 설계 되었다.


Department of Robotics, Hanyang University
손가락 절단 환자를 위해서는 가볍고 견고한 인공 의수가 필요하다.
본 프로젝트는 컴팩트한 손가락 모듈 및 핸드 메커니즘 개발을 위해 다양한 형태의
인공 의수 개발을 진행해 왔다.
개발된 의수는 Tendon 및 Actuator를 사용하여, Adduction/Abduction/물체 적응형 파지 동작 등이 가능하도록 설계 되었다.