
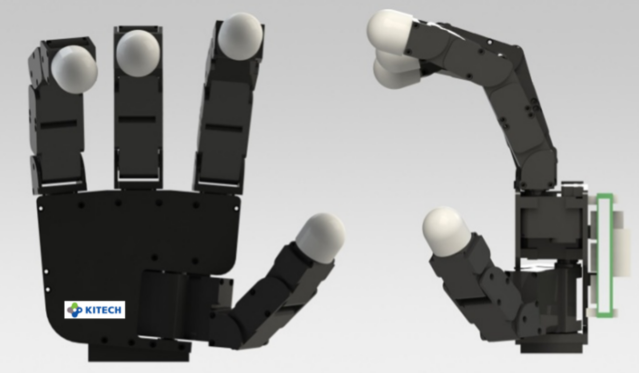
로봇 핸드 및 그리퍼
인간수준의 물체 파지 및 조작 연구를 위한 연구용 인간형 로봇 핸드와 산업현장에 실제 적용을 목표로 하는 산업용 로봇 그리퍼 개발을 진행. 다수의 국내외 기업에서 파지 및 조작 연구용으로 사용중에 있다.
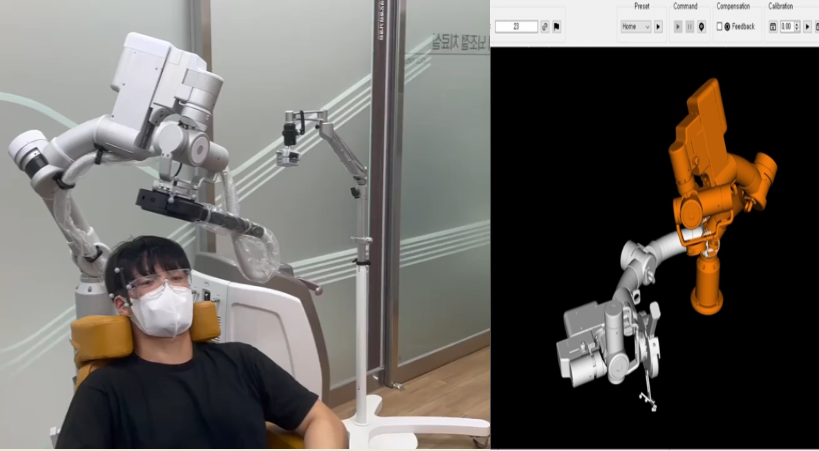
TMS 자동화 로봇 시스템
경두개자기자극술(TMS)은 비침습적으로 뇌를 자극하는 기술로, 우울증 등 뇌질환 질병 및 다양한 뇌관련 연구에 사용되고 있다. 본 연구에서는 이러한 TMS를 가지고 보이지 않는 뇌의 특정부위를 자극할 때 기존 보다 정확하고 편안하게 사용할 수 있는 의료용 자동화 로봇시스템을 개발한다.

파지 및 조작 (Grasping and Manipulation)
물체를 잡고 움직이거나 도구를 잡아 사용하기 위해서는 정교한 파지 및 조작 기술이 필요하다. 인간과 같이 손과 양팔을 사용하기 위해 인간의 파지 및 조작 원리를 규명하고 이를 이용해 인간수준의 고난이도의 조작 지능을 구현하는 것을 목표로 한다.

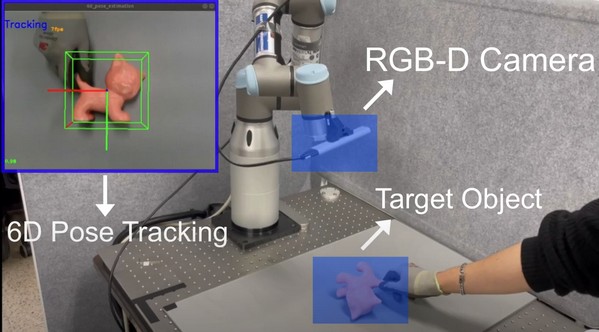
파지 조작을 위한 물체 인식 / 파지점 추출 / 자세 추정 기술
영상정보를 이용해서 물체 인식을 수행하고, 안정적으로 파지가 가능한 파지점을 계산한다. 미리 정해진 지점을 잡기 위해서는 물체의 6D Pose (3 위치, 3 자세)를 추정하는 연구도 수행한다. RGB-D 카메라를 주로 사용하고 딥러닝 기반의 방법론을 이용한다.
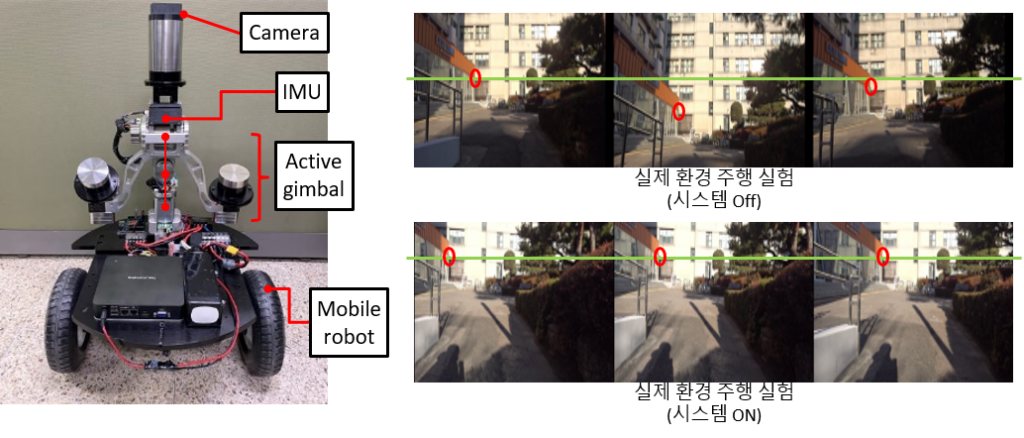
영상 및 LIDAR 센싱 안정화를 위한 active gimbal 시스템
센서가 진동할 경우, 얻어지는 데이터는 왜곡된다. 카메라의 경우, 블러링이라는 번짐 현상이 생기고 거리센서는 노이즈가 포함된다. 이러한 문제를 신호 처리를 통해 극복할 수도 있겠지만, 제일 먼저 고려할 것은 움직임의 영향을 최소하는 것이다. 본 연구에서는 이동로봇에서 센서 데이터를 얻을 때, 이러한 움직임을 최소하는 짐벌 시스템을 개발하였다.
Visual servoing demo
영상은 가장 중요한 정보입력 수단이다. 로봇은 영상을 기반으로 다양한 작업을 수행하는 형태로 발전할 것이다. 본 연구에서는 영상기반으로 물체를 추적하는 데모를 보여준다.
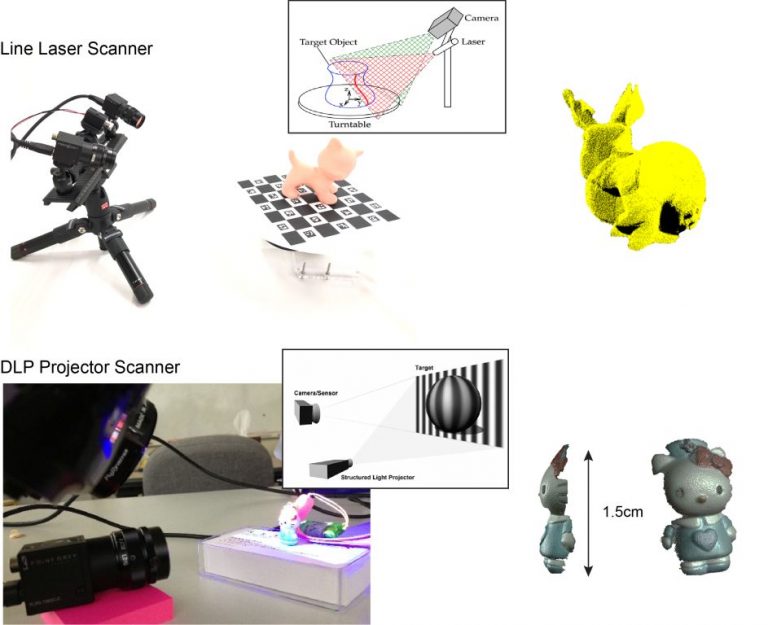
3D 스캐닝 관련 연구
물체로부터 3차원 정보를 획득하기 위한 3D scanner를 개발하였다. 본 연구에서는 Structured light 기반으로 Line 레이져를 이용한 Line 스캔 방식 및 DLP 프로젝터를 이용한 Area 스캔 방식의 두가지 스캐너를 만들었다. 개발된 스캐너는 특히 딥러닝 기반의 3차원 물체인식 네트웍크의 학습을 위한 데이터 생성에 사용된다.
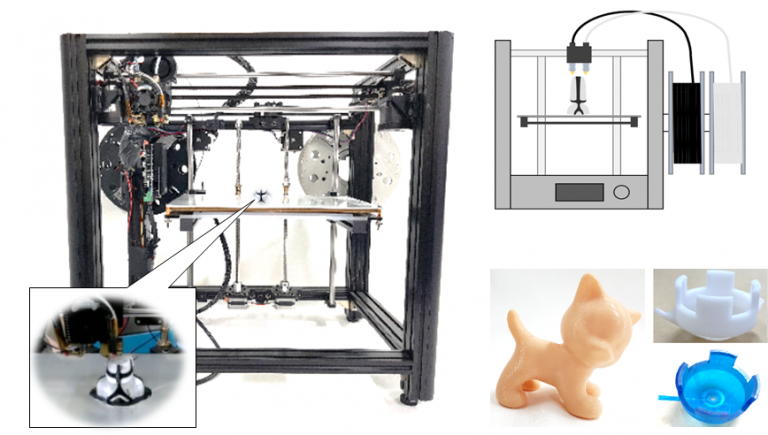
3D 프린터 관련 연구
3D프린터는 의료, 로봇, 건축, 음식등 다양한 분야에서 활용할 가치가 높은 기술이다. 3D프린터 기술에 대한 특허 만료와 오픈소스의 활성화로 다양한 3D프린터가 개발되고 있다. 높은 제조비용, 긴 출력시간, 낮은 정밀도 등은 해결해야할 문제이다.
본 연구에서는 아래 사진과 같이 오픈소스기반으로 멀티색상지원 3D프린터를 개발하였고 의료 및 로봇분야에서 사용할 수 있도록 높은 정밀도를 가지는 프린터로 확장하고자 한다.
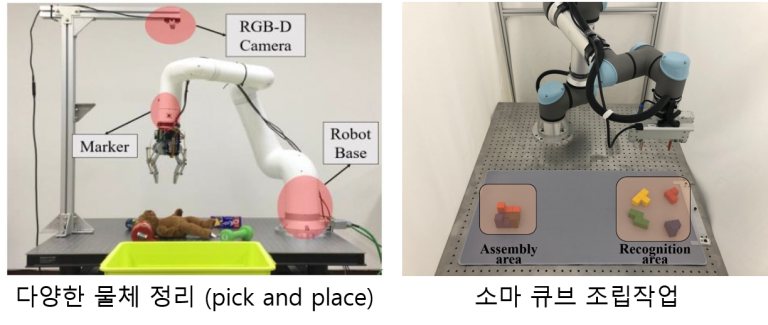
소마큐브 조립 데모 (물체 인식, 자세 추정 및 조작)
다양한 물체를 파지하고 조작하기 위해 물체 인식과 영상기반 로봇제어 기술을 개발한다.
RGB-D 카메라 데이터를 기반으로 영상처리, 3D Point Cloud Registration, 딥러닝 네트웍을 이용하여 인식하고 자세를 추정 한다.
Camera/Robot Calibration, Visual Servoing, Path Planning을 이용하여 물체를 조작 한다.
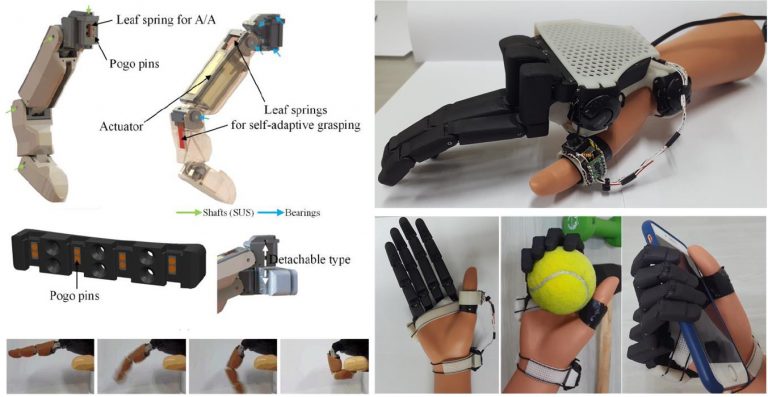
인공 의수 관련 연구
손가락 절단 환자를 위해서는 가볍고 견고한 인공 의수가 필요하다. 본 프로젝트는 컴팩트한 손가락 모듈 및 핸드 메커니즘 개발을 위해 다양한 형태의 인공 의수 개발을 진행해 왔다. 개발된 의수는 Tendon 및 Actuator를 사용하여, Adduction/Abduction/물체 적응형 파지 동작 등이 가능하도록 설계 되었다.
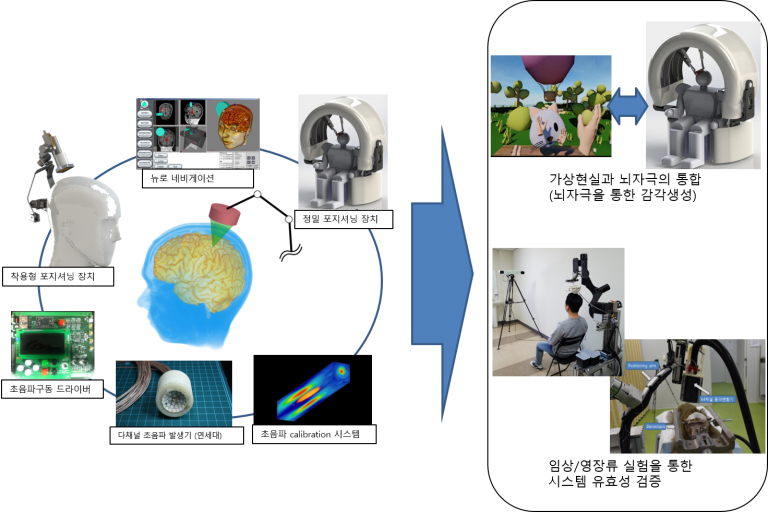
실감교류를 위한 비침습뇌자극 시스템 개발 (과학기술정보통신부 글로벌프론티어 2015 ~ 2019)
가상현실을 보다 생동감 있게 만들기 위해서는 시각 이외의 다양한 감각을 생성하는 것이 필요하다. 예를 들어 촉각을 실제로 만들기 위해서 기계적인 장치로서 해당 부위를 누르거나 진동시키는 방식으로 접근하였다. 본 프로젝트는 완전히 다른 방법론을 추구한다. 감각에 해당하는 뇌영역을 비침습적인 방법으로 자극하여 감각을 만들어내는 것이다.
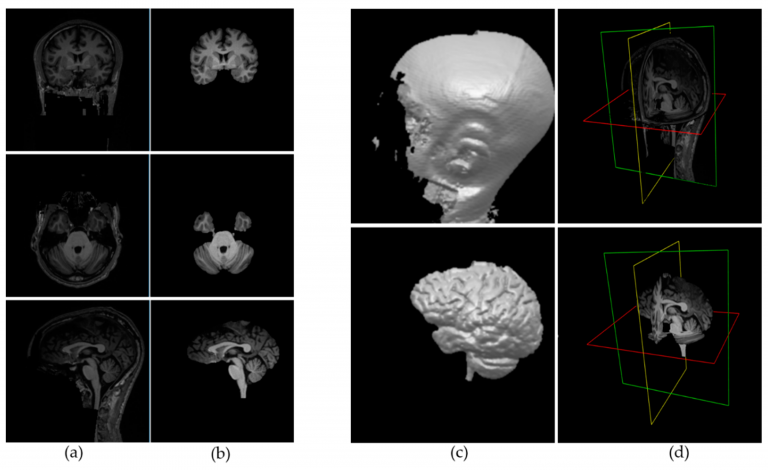
Brain Extraction (Skull Stripping)
Brain Extraction이라 MRI 데이터로부터 뇌영역을 추출하는 과정을 말한다. MRI brain 영상처리를 위한 필수적인 전처리 과정이다. 본 연구에서는 기존의 이미지처리 방법과 딥러닝(Deep Learning)을 이용한 방벙을 모두 이용하여 segmentation 해주는 알고리즘을 개발한다.
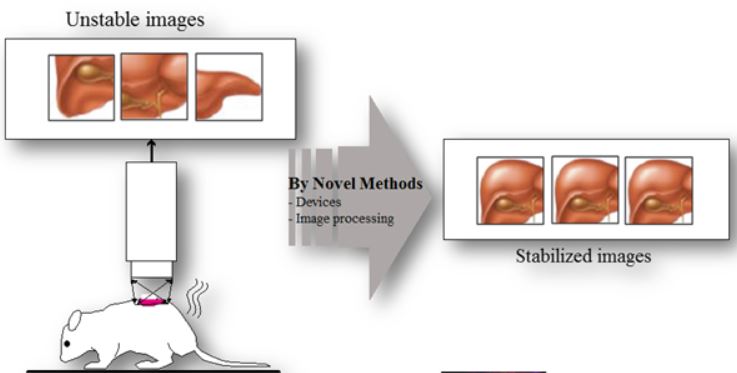
고배율 생체 현미경을 위한 영상처리 및 제어 기술 개발
살아 있는 생체를 있는 그대도 관찰하는 것을 in vivo imaging이라고 한다. in vivo imaging은 가장 자연스러운 환경에서 다양한 연구(예, 약물 테스트)를 진행할 수 있다는 점에서 기존의 세포 배양이나 조직을 이용한 연구에 비해 큰 정점을 지닌다.

이동 로봇 (Mobile Robotics) 연구
다양한 서비스에 사용되는 이동 로봇을 개발하였다.
아래 사진은 차례로 홈서비스로봇, 안내로봇, 영어도우미 로봇을 보여준다.